三維重建(3D Reconstruction)是計算機視覺和空間計算技術中的一項核心技術,旨在從二維信息中恢復出三維模型或場景。這項技術通過處理來自不同來源的數(shù)據(jù)(如圖像、視頻或傳感器數(shù)據(jù)),構(gòu)建出能夠準確反映真實物體或環(huán)境的三維表示。三維重建技術是虛擬現(xiàn)實(VR),實景三維,元宇宙,游戲等領域構(gòu)建虛擬數(shù)字空間的基礎技術,能夠?qū)崿F(xiàn)對物理空間最完整、最深度的信息采集。
三維重建包含兩個重要階段:數(shù)據(jù)采集和數(shù)據(jù)制作。

空間數(shù)據(jù)采集階段
深度信息采集:
通過專業(yè)設備(如激光雷達傳感器、結(jié)構(gòu)光傳感器等)或算法(如單目圖像 AI 深度估算模型)獲取場景中物體的深度信息。
激光雷達傳感器向物體發(fā)射一束光,并通過接收裝置測量光線反射或散射回來的時間差,從而計算出物體離采集設備的距離,得到物體的深度信息。如果再配上一個角度測量裝置,測量光線發(fā)射的角度,結(jié)合已知的距離信息,就能直接得到該物體在三維物理空間中的坐標。當我們利用傳感器同時向場景發(fā)射無數(shù)道光,就能得到場景中各點的空間信息,也就是這些點離傳感器有多遠、在哪個角度等,并據(jù)此繪制出精準的深度圖和點云。激光雷達這種采集方式在空間數(shù)據(jù)的精準性、實時性、便捷性、抗干擾性等方面具備顯著優(yōu)勢。眾趣旗下的自研 SPACCOM X3 系列 3D 激光掃描儀,每秒采集 20 萬個點云數(shù)據(jù),掃描精度達 10mm,最遠測距 70m。在采集過程中 SPACCOM X3 顯示出卓越的環(huán)境適應性,并能夠精確捕捉空間內(nèi)的每一處細節(jié),讓大空間和超大空間三維重建變得輕松與高效,為專業(yè)人士提供無與倫比的便利體驗。
單目圖像深度估計也是一種獲取場景中物體深度的 AI 方法,它僅依賴于 RGB 相機采集得到的彩色圖像便能快速估算物體深度。因為人類通過兩個眼睛的視差來實現(xiàn)對距離的估算,但事實上我們用單個眼睛也可以大致估算出距離,這是因為腦已經(jīng)記住了一些規(guī)律,比如已知大小的物體在圖像中越小則距離越遠、近處的物體會擋住遠處的物體等。利用這一原理,眾趣科技通過積累的數(shù)百萬專業(yè)設備掃描的三維數(shù)據(jù)集,以彩色圖為輸入、深度信息為標注(答案)訓練出單目圖像深度估算 AI 模型,實現(xiàn)無需深度傳感器、僅采集空間圖像即可實現(xiàn)三維重建。深度估算模型的誕生,推動了眾趣輕量級 VR 采集產(chǎn)品的誕生,讓 VR 拍攝進入大眾的日常生活成為可能。
圖像信息采集:
使用 RGB 相機采集高色彩還原度的圖像信息。圖像可用于點云上色、為三維模型提供豐富的紋理細節(jié),也可拼接成 360 度全景圖像用于 VR/AR 的應用。眾趣旗下的自研 SPACCOM X3 系列 3D 激光掃描儀,集成了高清相機,通過自研的無縫拼接算法可生成原生 1.34 億像素的 16k 全景圖像,同時使用自研 HDR 算法,可最大程度保留拍攝場景的高光與陰影細節(jié),使畫面更接近人眼的真實視覺體驗。
點位拼接:
定點式掃描需要在固定點位采集深度和圖像信息。合理規(guī)劃點位布局和掃描路線能有效覆蓋作業(yè)場景,提升作業(yè)效率。點位拼接針對稀疏離散的點位建立位姿關系。利用點位采集到的彩色圖像和深度信息,通過提取特征尋找相似的匹配點位,并計算相對位置和姿態(tài),最終實現(xiàn)多個點位之間的精確拼接。此外結(jié)合 IMU(慣性測量單元,是一種集成了多種慣性傳感器的裝置,用于測量和跟蹤物體的加速度和角速度)等三方傳感器數(shù)據(jù)能提高拼接的魯棒性,克服特殊場景(弱紋理、長走廊等)帶來的退化問題。

數(shù)據(jù)制作階段
生成點云:
點云是空間中代表 3D 形狀或?qū)ο蟮臄?shù)據(jù)點集合,數(shù)據(jù)集中的每個點代表一組 X、Y、Z 幾何坐標。在這一步中,制作流程會轉(zhuǎn)化采集的深度信息為點云對象。
點云處理:
對點云數(shù)據(jù)進行去噪、異常值過濾等優(yōu)化處理,提高后續(xù)三維重建的準確性和效率。
點云融合:
將多站的點云數(shù)據(jù)進行融合處理。包括多站點位間的位姿優(yōu)化、多站點云的融合處理、整體點云的分塊管理等。
網(wǎng)格重建:
由離散的點云生成連續(xù)表面。將點云數(shù)據(jù)連接成網(wǎng)格(網(wǎng)格單元一般為三角形或者四邊形),形成多面體形狀的外殼。
網(wǎng)格處理:
對網(wǎng)格數(shù)據(jù)進行優(yōu)化和調(diào)整,去除尖銳邊緣和不平整表面,使模型更加平滑自然。
紋理映射:
將采集的高清圖像精確映射至模型網(wǎng)格表面,使三維模型更加真實。
3D 模型:
網(wǎng)格和紋理全部組合在一起,就得到了一個完整的三維模型,它支持在 3D 引擎中進行渲染和交互操作,譬如旋轉(zhuǎn)、放大、縮小等。
格式轉(zhuǎn)化:
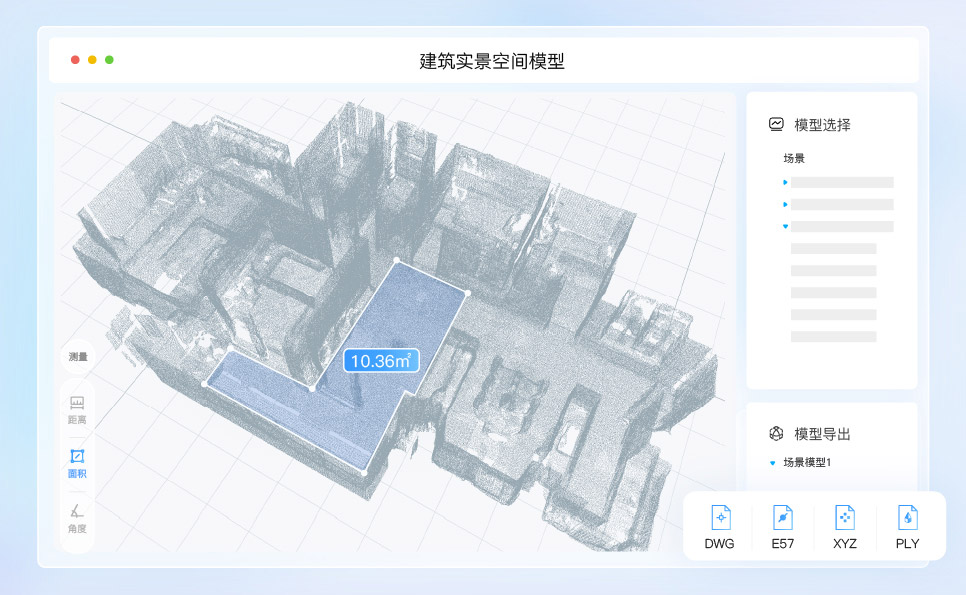
生成的 3D 模型文件可轉(zhuǎn)化為行業(yè)通用的標準格式,方便與專業(yè) 3D 設計軟件對接。
成熟大規(guī)模落地三維重建介紹
(眾趣空間重建)
在數(shù)據(jù)采集階段,同時采集深度信息與圖像信息,為后續(xù)數(shù)據(jù)制作提供了多模態(tài)數(shù)據(jù)基礎。
基于多模態(tài)數(shù)據(jù),提取出豐富的語義信息。語義信息是指對三維模型中各元素(如物體、場景等)的識別和標注。在三維重建過程中引入語義信息,有助于提高模型的準確性和實用性。
點云處理環(huán)節(jié),結(jié)合多模態(tài)數(shù)據(jù)有效去除雜點,并進行智能空洞填補。
高效的多站點位姿優(yōu)化技術。實現(xiàn)多站點數(shù)據(jù)的精準對齊,配準誤差<5mm。
格式轉(zhuǎn)換支持導出 LAS、PLY、E57 等標準點云格式。與 Revit、CAD、3DMax 等專業(yè)軟件無縫對接。
獨有的 AI 空間計算技術。以豐富的語義信息為基座,結(jié)合多模態(tài)數(shù)據(jù)可自動識別空間結(jié)構(gòu)的關鍵點、線、面信息。針對房產(chǎn)領域,該技術可自動生成戶型圖、實勘圖片和短視頻,構(gòu)建 3DVR 房源數(shù)據(jù)庫,提升房源實勘質(zhì)量。在三維重建過程中,該技術可以挖掘出豐富的潛藏數(shù)據(jù),如空間結(jié)構(gòu)信息、文字信息、物體信息等。這些數(shù)據(jù)可以進一步應用于數(shù)字空間的多樣化場景,如營銷推廣、內(nèi)部管理、人員引導、模擬培訓等。
應用領域
三維重建技術廣泛應用于城市規(guī)劃、影視制作、游戲開發(fā)、考古研究、文物保護、醫(yī)療影像、虛擬現(xiàn)實(VR)、增強現(xiàn)實(AR)等諸多領域。隨著技術的不斷發(fā)展,其應用的廣度和深度將不斷拓展。
城市規(guī)劃:
用于城市三維建模、交通規(guī)劃等,提升城市規(guī)劃的科學性和精準度。
影視制作:
為特效制作提供逼真的三維場景和角色模型,增強影視作品的視覺效果。
游戲開發(fā):
構(gòu)建豐富的游戲場景和角色模型,提升游戲的沉浸感和互動性。
考古研究:
對古代遺址進行三維重建,為考古研究提供直觀、準確的數(shù)據(jù)支持。
文物保護:
對珍貴文物進行數(shù)字化保護,實現(xiàn)文物的永久保存和虛擬展示。
醫(yī)療影像:
在醫(yī)學影像領域,用于構(gòu)建人體器官的三維模型,輔助醫(yī)生進行診斷和治療規(guī)劃。
總結(jié)
眾趣科技通過持續(xù)迭代其三維重建技術體系,在精度、效率和易用性方面建立行業(yè)標桿,為數(shù)字孿生應用提供堅實的技術基礎。2024 年推出的 SPACCOM X3 Pro 系列設備進一步提升了超大空間場景的數(shù)字化能力,推動多行業(yè)的三維數(shù)字化升級。眾趣科技在三維重建領域具有鮮明的特色和優(yōu)勢:
技術領先:
網(wǎng)格和紋理全部組合在一起,就得到了一個完整的三維模型,它支持在 3D 引擎中進行渲染和交互操作,譬如隨意旋轉(zhuǎn)、放大、縮小等。
效率突破:
將傳統(tǒng)方法需要數(shù)天甚至數(shù)周完成的三維建模任務縮短至幾十分鐘內(nèi)完成,大大提升了工作效率。
精度保障:
具有工業(yè)級點云精度和超高紋理分辨率,支持 16K 超高清呈現(xiàn),確保模型的真實性和細節(jié)表現(xiàn)。
全場景覆蓋:
從智慧警務、房產(chǎn)服務到工程建筑等多個領域,眾趣科技的技術均展現(xiàn)出廣泛的應用潛力和價值。
數(shù)據(jù)安全:
支持國產(chǎn)化部署,滿足公共安全等領域的數(shù)據(jù)安全需求,為用戶提供更加可靠和安心的服務。

400-779-7900
 智慧園區(qū)
智慧園區(qū) 展會展廳
展會展廳 工程測繪
工程測繪 公共安全
公共安全 文博旅游
文博旅游 電商零售
電商零售 房產(chǎn)營銷
房產(chǎn)營銷 720°全景
720°全景 電力能源
電力能源